³Cat-4
³Cat-4
The fourth satellite in the lab's CubeCat series

The 3Cat-4 (read “cube-cat-four”) is the fourth member of the CubeSat series of UPC’s NanoSat Lab. This mission mission aims at demonstrating the capabilities of nano-satellites, and in particular those based in the 1-Unit CubeSat standard, for challenging Earth Observation (EO) using Global Navigation Satellite System - Reflectometry (GNSS-R) and L - band microwave radiometry, as well as for Automatic Identification Services (AIS). The goals of this mission are three-fold:
- Educational: the development of this nano-satellite has been carried out by graduate and undergraduate students, which have designed, implemented, and validated most of their subystems. In addition, mission analysis (e.g. thermal analysis, link budget, etc.) have also been conducted by students, who have also conceived exhaustive test campaigns with industry-rated equipment. Coordinated by the team leaders, several undergraduate students have participated in this mission either as part of a capstone project course within their degree curricula or as their degree thesis.
- Technology demonstration: the Flexible Microwave Payload - first version (FMPL - 1), the CubeSat payload, has entirely been developed in the laboratory, and includes three EO instruments in one single subsystem. In addition, the 3Cat-4 also demonstrates the feasibility of the payload antenna deployment. This mission aims thus to demonstrate that this kind of technology is useful for future CubeSat missions.
- Scientific experiments: the 3Cat-4 CubeSat will generate Earth observables to address different scientific interests:
- Assess the relative sensitivity of GNSS-R observables (waveform peak amplitude and maximum derivative delay) at different frequency bands (i.e. L1 and L2).
- Assess the impact of the required ionospheric corrections (i.e. different delays of the reflected signals at different bands).
- Evaluate the potential application of GNSS-R over land surfaces, and in particular to infer soil moisture and vegetation biomass, with special focus over forests, where other missions are not able to due to RFI (e.g. at UHF band).
- Assess RFI detection and mitigation techniques for digital radiometers.
- Create RFI maps at L1, L2 and the protected band from 1400 to 1427 MHz.
- Validate the design of an AIS receiver for space-borne applications.
The 3Cat-4 mission has been accepted and takes part of the "Fly Your Satellite!" program (second edition) of the European Space Agency (ESA) Academy.
| Spacecraft class | 1-Unit CubeSat. |
| Total mass | 1.3 kg. |
| Stowed Dimensions | 100 mm x 100 mm x 113.5 mm. |
| Deployed Dimensions | 100 mm x 100 mm x 595.75 mm. |
| Mission status | Phase D2: System verification |
| Launch date (expected) | Summer 2024 |
| Launcher details | Maiden flight Ariane 6 |
| Sponsor |
European Space Agency (ESA) |
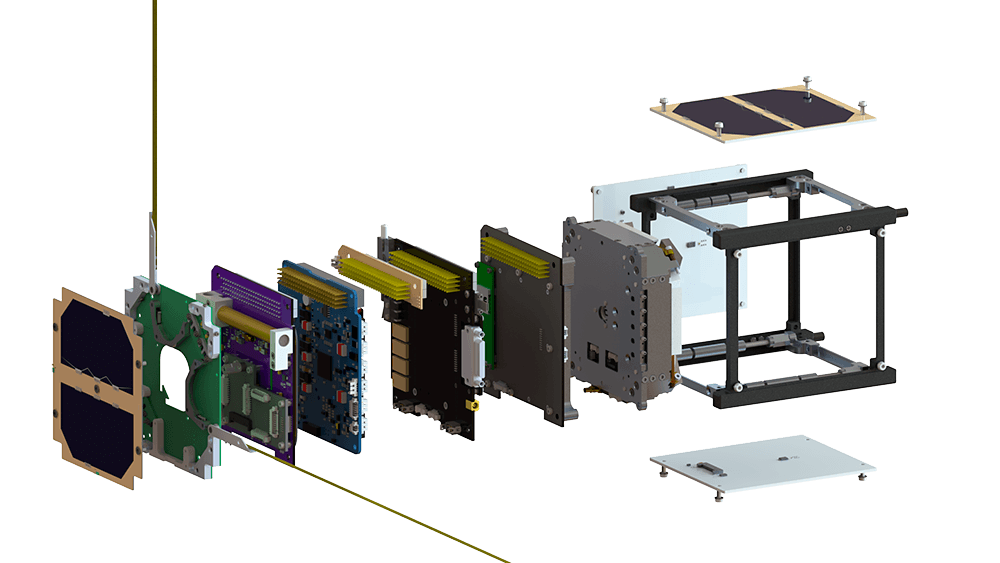
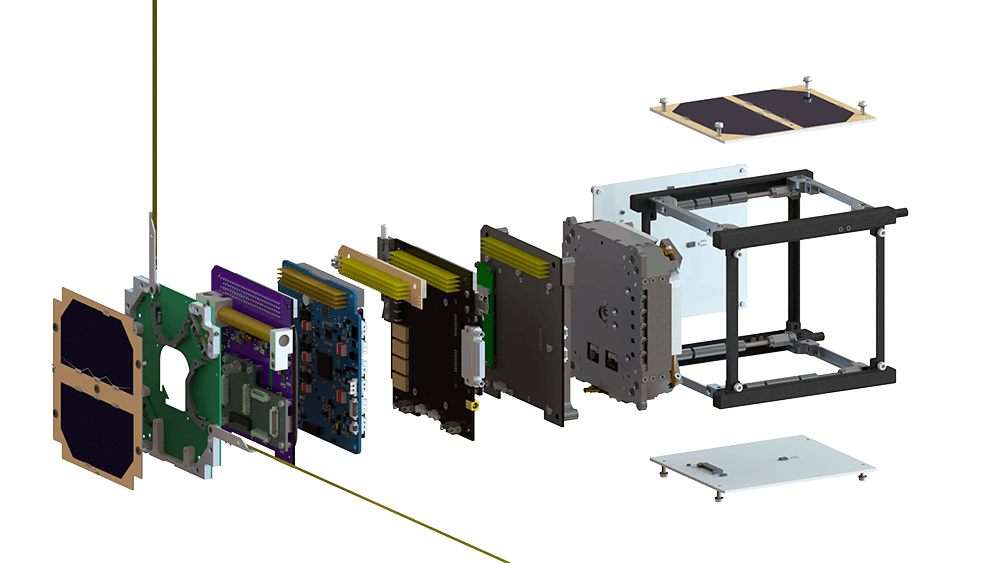
3Cat-4 CubeSat Architecture
The 3Cat-4 spacecraft is composed of different subsystems:
- Zenith Antenna and Deployment Subsystem (ZADS): a monopole deployable antenna system that contains 2 antennas (VHF and UHF radio systems).
- Communications Subsystem (COMMS): it is the responsible of the communications between the satellite and the Ground Station.
- Attitude and Orbit Control Subsystem (AOCS): it is the responsible of the determination and control of the spacecraft orientation with respect to an inertial frame of reference respectively.
- On Board Computer (OBC): provides processing capability to the satellite, for the Local Mass Memory function, interfacing with other avionics subsystems, failure detection, On Board time management
- Electrical Power Subsystem (EPS): it has the function to gather, collect and provide the necessary electrical power to all the spacecraft subsystems during all mission phases.
- Flexible Microwave Payload (FMPL - 1): it represents the Payload of the spacecraft, integrating three mission experiments in a single hardware and software platform. In particular, these experiments are a miniature GNSS-R receiver, an L-Band Radiometer, and an AIS receiver.
- Nadir Antenna and Deployment Subsystem (NADS): it fulfills two functions which are: to contain the L-Band antenna for the FMP acquisition, and to deploy the Gravity Boom to generate a Gravity Gradient.
- Solar Panels (SP): it is responsible for collecting the solar energy, and to determine using the Sun sensors the orientation of the satellite.
- Interface Board: it is the module which connects the satellite to the PC in order to program and debug the satellite.
Flexible Microwave Payload
The 3Cat-4 payload is able to combines three different instruments in one single board. This is possible because a Software Defined Radio (SDR) module is used to work in the different frequency bands. The payload is called Flexible Microwave Payload - first version (FMPL-1) because it performs the following observables:
- Using an Automatic Identification Service (AIS) receiver, it is possible to track the trajectory of different vessels that are placed in remote areas without ground infrastructure (e.g. Atlantic Ocean).
- Soil moisture and biomass vegetation can be studied using the L-band microwave radiometer of the payload.
- The Global Navigation Satellite System - Reflectometer (GNSS-R) provides observables of surface roughness, and ice coverage.
The FMPL-1 is composed of System On-Module (SOM) that works as the processing unit to format the raw measurements. In addition, different RF reception chains are implemented to maximize the quality of the received signals, that are provided by three independent antennas.
On-Board Computer and Flight Software
The Software is executed using the FreeRTOS as the Operative System (OS). This Real-Time Operative System (RTOS) structures the applications by independent tasks, which each one is executed with its own context and can be pre-empted by a central RTOS scheduler. This priority-based task scheduler allows the execution of a task depending on its priority level, and in same level case it is a Round Robin scheduler. The flight software implements most of the spacecraft functionality, including energy management, system state control, on-board task scheduling and execution of scientific experiments, the communication protocol and sensor monitoring and housekeeping activities. However, each subsystem has its own firmware that enables to interact with the corresponding hardware (e.g. AOCS firmware performs satellite pointing).
Electric Power Subsystem
The EPS, the COTS Nanopower P31u designed and developed at GomSpace, is the spacecraft's main bootstrap. It manages the satellite's energy reservoir, interfacing the spacecraft system with two Lithium-Ion batteries that are supplied by five solar panels. With a total energy storage of 2600 mAh, the Lithium-Ion batteries adaptively supply power at 3.3 V and 5 V to the rest of subsystems when the satellite is in the penumbra/umbra region of its orbit (i.e. eclipsed by the Earth). This subsystem is controlled by a centralized microcontroller, which controls localized DC/DC converters. These decentralized power converters are located in each point of load (i.e. each floor has several of them) and implement overcurrent protection to isolate subsystem faults potentially caused by SEL.
The spacecraft's solar panels have been designed with AzurSpace 3G30A solar cells, with a Gallium Arsenide (GaAs) cell type on Germanium (Ge) substrate. The power conversion efficiency of the solar panels is 30 %, yielding to a maximum power of 2.4 W. When the spacecraft is not in a critical energy state, the EPS relays the power management to the OBC, interfaced through a standard serial bus (I2C).
Communications Subsystem
The communication subsystem of the 3Cat-4 has been entirely designed and implemented in the NanoSat Lab. It comprises an amateur-band transceiver, operating at the UHF band (437.35 MHz). The transceiver is based on a COTS module from Texas Instruments, broadly used for wireless sensor networks: the CC1101. Mounted in a single board with an Radio Frequency (RF) power amplifier that boosts the signal up to 1 W (30 dBm), and a Low Noise Amplifier (LNA) that provides approximately 16 dB of gain in reception. With this performance, this module provides both the satellite uplink and downlink channels.
The antenna system for the UHF band is composed of a monopole antenna which is deployed at the system start-up. The monopole has an omni-directional pattern, allowing the satellite to be commanded even with the attitude control disengaged.
During the mission, the 3Cat-4 transmits periodically a beacon that contains specific information of the satellite status. This beacon is composed of the Instantaneous Telemetry (IT) that includes the current satellite telemetry, and the Historic Telemetry (HT) that is a set of compressed IT representing the satellite status during the previous 32 hours. Address to "How to receive from 3Cat-4" for more information about receiving this beacon.
Attitude and Orbit Control Subsystem
The 3Cat-4 payload requires a specific pointing state in order to achieve the desired observables. Specifically, the required pointing is that the spacecraft body –Z axis must point to Nadir (towards the Earth center point). This is accomplished thanks to a Proportional-Integral-Derivative (PID) controller which uses the attitude quaternion determination computed with the Optimal REQUEST algorithm. Thanks to sun sensors, a three-axis magnetometer, and a three axis gyroscope, the attitude determination is achieved successfully.
Moreover, the 3Cat-4 is expected to be launched from the International Space Station (ISS), which can disturb the initial attitude state. In particular, the initial angular speed can be close to the 30 º/s. For that reason, the AOCS starts a B-dot algorithm to detumble the satellite. Once the angular speed is lower than 0.5 º/s, the nadir pointing becomes the predominant objective. This attitude behavior is achieved using a three magnetorquer (one per axis) that can generate 0.2 Am².
How to receive from ³Cat-4
Would you like to collaborate with us and receive and decode ³Cat-4's telemetry? Here is how you should do it.
The ³Cat-4 nano-satellite has not been launched yet. Details on the open beacon signal of this spacecraft will be posted a few days before its launch together with a recommended setup and technical details for its reception and interpretation.

{kind=link}
{kind=link}
Share: